Open Duck Mini
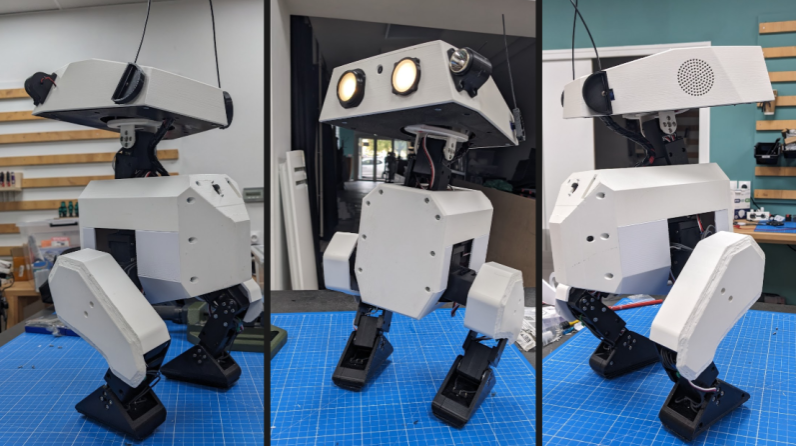
Az Open Duck Mini a Magyar Robotikai Szövetség első közösségi robotépítési projektje. A nyílt forráskódú, 3D nyomtatott kétlábú (biped) robot a Disney BDX droid alapján készült, és tökéletes belépőpont a humanoid robotikába.
A projekt célja
A közösség tagjai együtt építik meg az Open Duck Mini robotot, miközben elsajátítják:
- 3D nyomtatás és mechanikai tervezés
- Szervóvezérlés és elektronikai összeszerelés
- AI-vezérelt működés és nagy nyelvi modell integráció
- Sim2real pipeline (szimulációból valós robotra)
Műszaki adatok
| Jellemző | Érték |
|---|---|
| Magasság | ~42 cm |
| Motorok | 14x Dynamixel XL-330 |
| Vezérlő | Raspberry Pi 5 + AI Hat |
| IMU | BNO085 |
| Várható költség | ~300 000 Ft |
| Licenc | Apache 2.0 |
A robot videón
Szponzori megjelenés
A szponzorokat és építőket megjelenítjük ezen a webfelületen (kérésre hivatkozással), és felmatricázzuk a nevükkel a robotot – így minden eseményen, videón és sajtóanyagon láthatóak lesznek, hasonlóan a Formula–1 autókhoz. Ez egy különleges, hosszú távú megjelenési lehetőség a robotika és technológia iránt érdeklődő közönség előtt.
Szponzorok és támogatók
A te neved vagy céged lehet itt.
Építők és résztvevők
Csatlakozz az építőcsapathoz!
Csatlakozz a projekthez
Jelentkezz önkéntesnek – Ha szeretnél részt venni az építésben, tervezésben vagy programozásban.
Szponzori érdeklődés – Ha céges vagy szakmai támogatóként csatlakoznál a projekthez.
Támogasd a projektet – Adományoddal segítheted az alkatrészek beszerzését.
Emellett:
- Ismerd meg a projektet a GitHub repón
- Csatlakozz a Robotok Magyarul csoporthoz
- Gyere el a következő építési workshopra
Státusz
A projekt aktív fejlesztés alatt áll. Az első prototípus építése folyamatban van, workshopokat szervezünk az alkatrészek nyomtatásához és összeszereléséhez.
Következő lépések
- Robotkarok – nyílt forráskódú manipulátorok építése
- Nagyobb humanoid robotok
- Közösségi labor kialakítása
Kapcsolódó dokumentumok
A projektben való részvételre az alábbi szabályzatok vonatkoznak: